
前回変形機構の作製を行ったHGキマリストルーパー。今回は前回の続きで変形機構の改造を進めていきます。
大掛かりな改造を考えては形になる前に断念してを繰り返し、なかなか進みません……
それでは内容に入っていきましょう。
現状の確認
まずは現状の確認。元のトルーパーと比べて、変形機構を追加したことで、大きくフォルムが変化しています。

気になるところとしては、前脚が胴体よりも前に出ていることと後ろ脚と比べて前脚の間隔が狭いことの2点ですね。あとは肩アーマーにパーツを追加したことでシールドを腕に付けられなくなったのでどうにかしなければいけません。
今回はこれらの改造を行っていきます。

MS形態は写真のような感じにする予定です。後ろ脚がフライトユニットのようになる形で調整中です。この状態をベースに次回以降、両形態で違和感のないように装甲を弄っていく予定です。
関節位置の調整
それでは前脚の付け根の関節位置の調整を行っていきます。理想のバランスとしては下の画像のような感じ。


この状態だと1cmぐらい接続位置を後ろにズラす必要があります。本来は可動を仕込んで変形にする方がいいのですが、HGなので変形用パーツを作ることにしました。
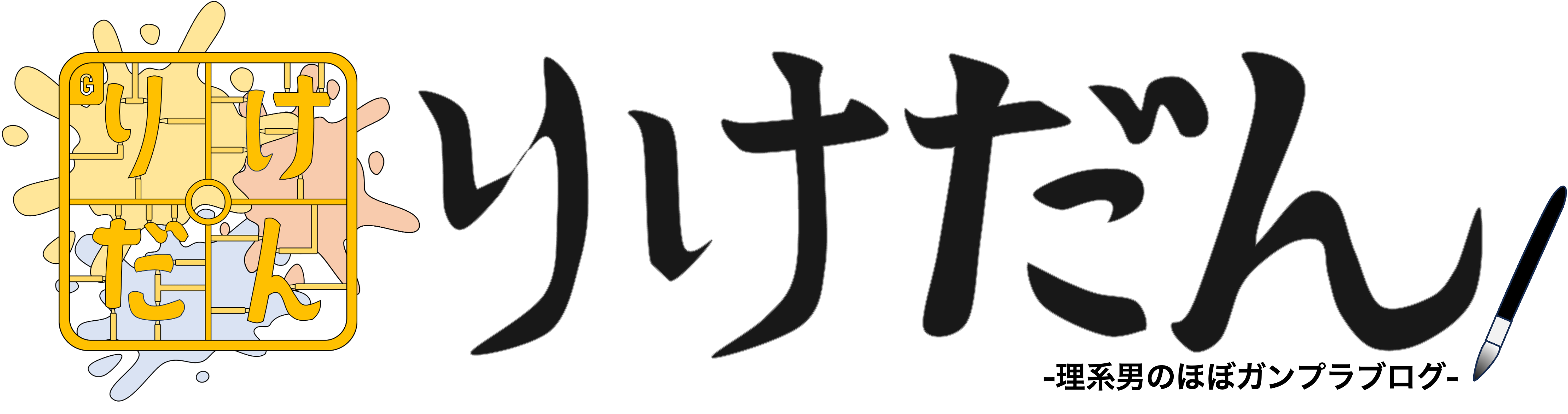
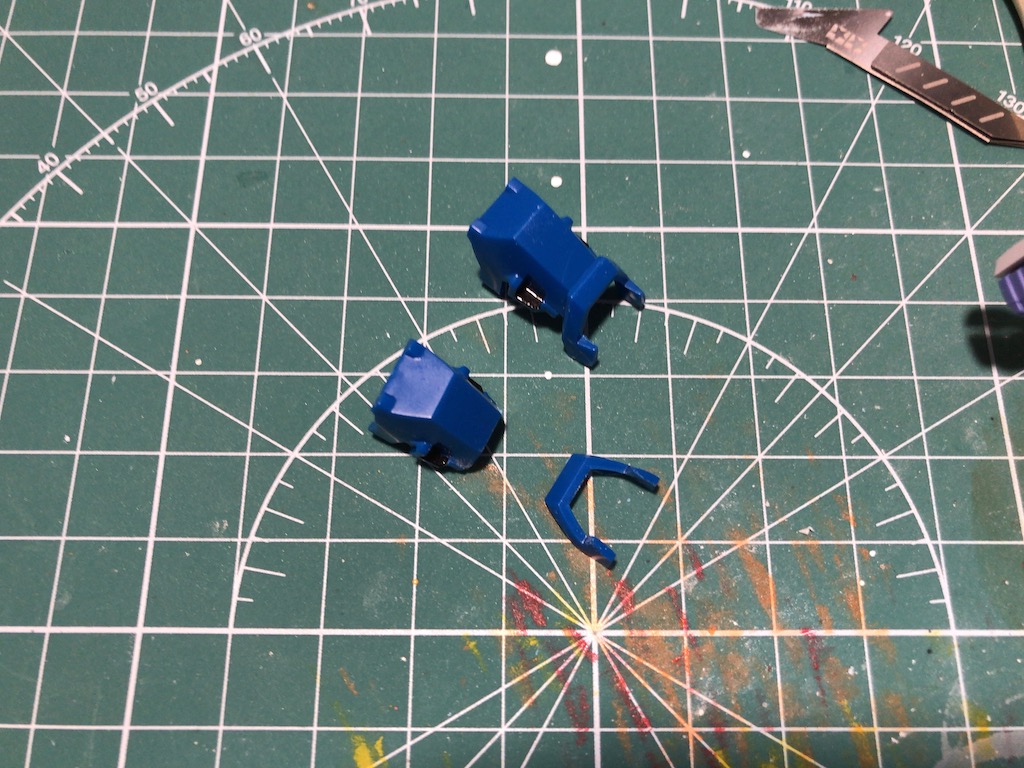
まずは毎度お世話になっているHGダンタリオンから股関節を取ってきます。

エッチングソーを使って、接続軸をジョイントのような形に切断します。これを移動後の脚接続部として使用。

元の接続軸から移動後の位置まではジョイントパーツとプラ材を組み合わせて伸ばしていきます。
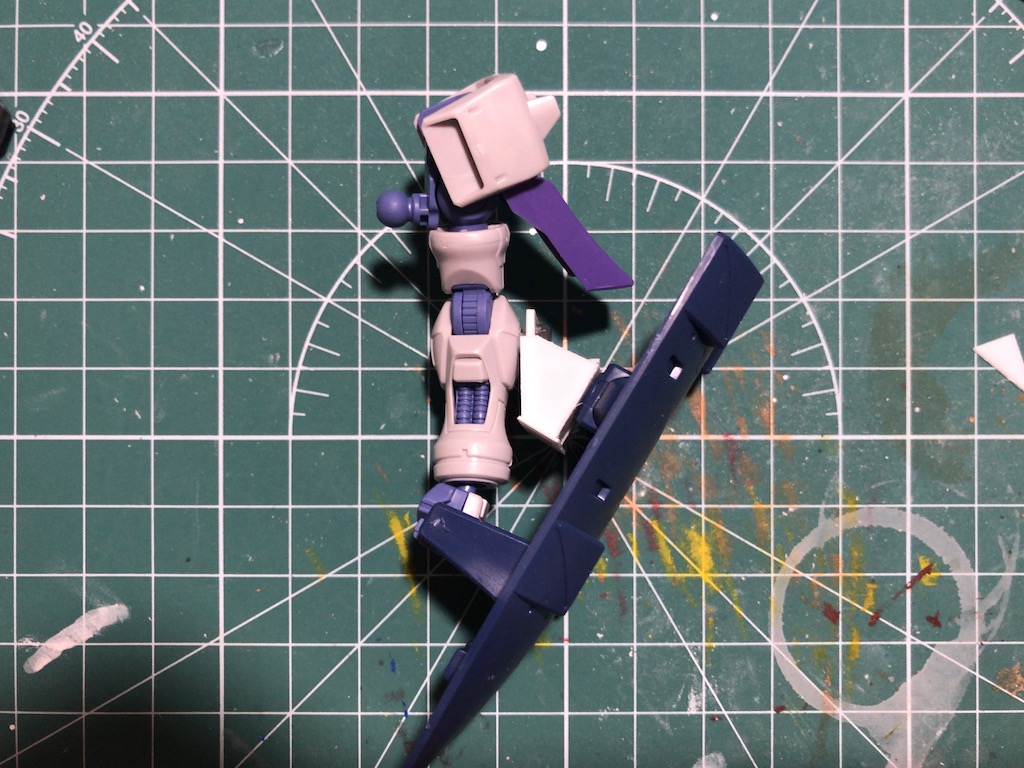
完成したジョイントパーツが下の写真。強度的に折れそうなところはプラ板を積層して補強しています。

本体に付けてみました。関節位置が後ろに移動するとともに、脚の間隔も広くなっています。

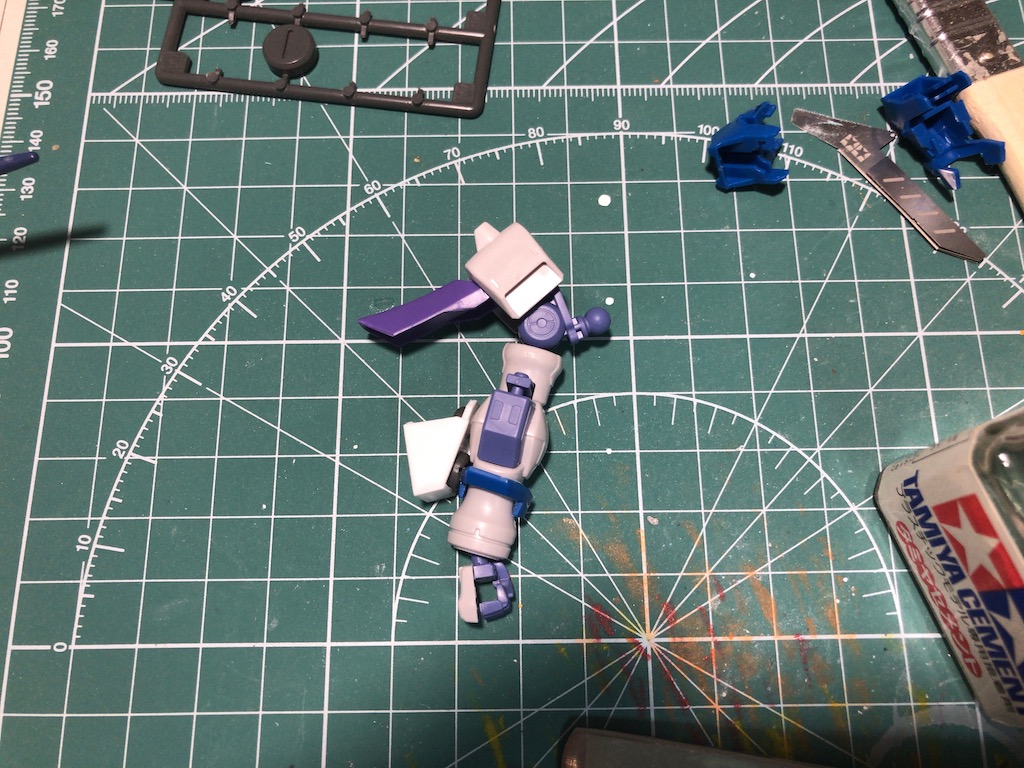
ジョイント接続時に邪魔になるサイドアーマーはひとまず切断してしまいました。どちらにせよ後で改造予定なので問題はないです。

脚を付けてみました。だいぶ脚と胴体の位置関係が改善しました。


脚の間隔も後ろ脚と同程度開いてバランスよくなりました。ジョイントがチラ見えしますが、そのあたりは腰回りの改造で隠す予定です。
シールドのジョイント作製
次はシールドのジョイントの作製。

肩アーマーの改造の都合で、ジョイントが接続できなくなってしまいました。この際、腕に対して若干斜めになるように元の接続部を中継するジョイントパーツを作ることにします。

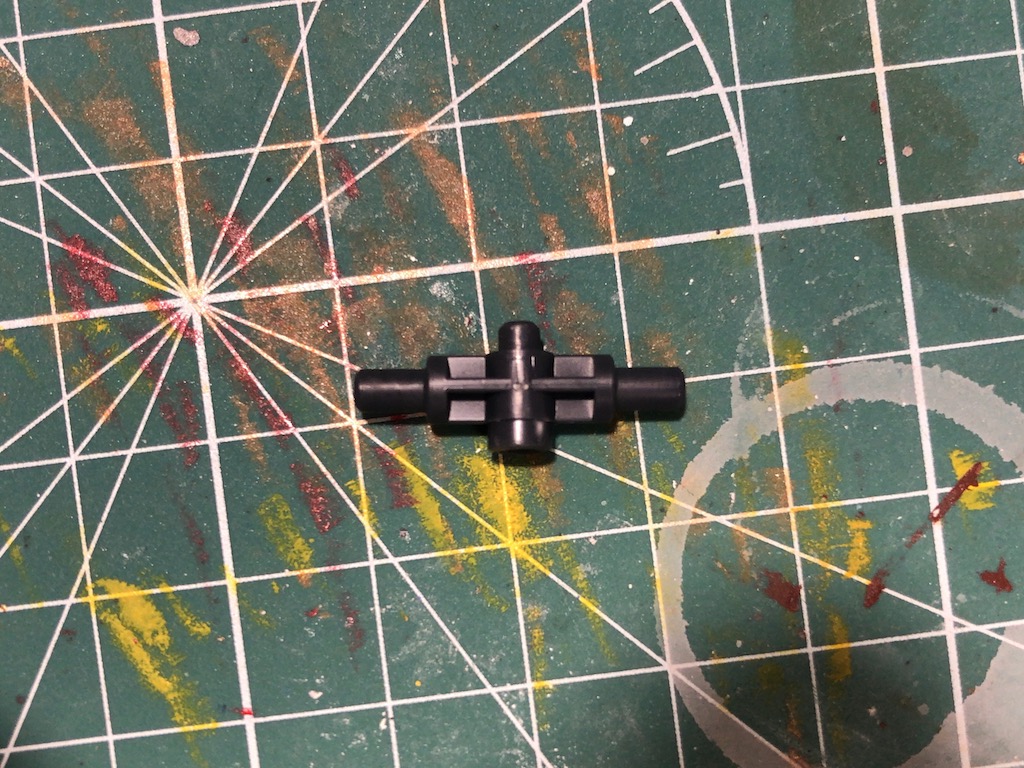
作製自体はかんたんで、プラ板の箱組みと3mm丸棒で作製。ディティールアップパーツも使用しています。
ディティールアップパーツの在庫が減ってきたので買い足さないと……
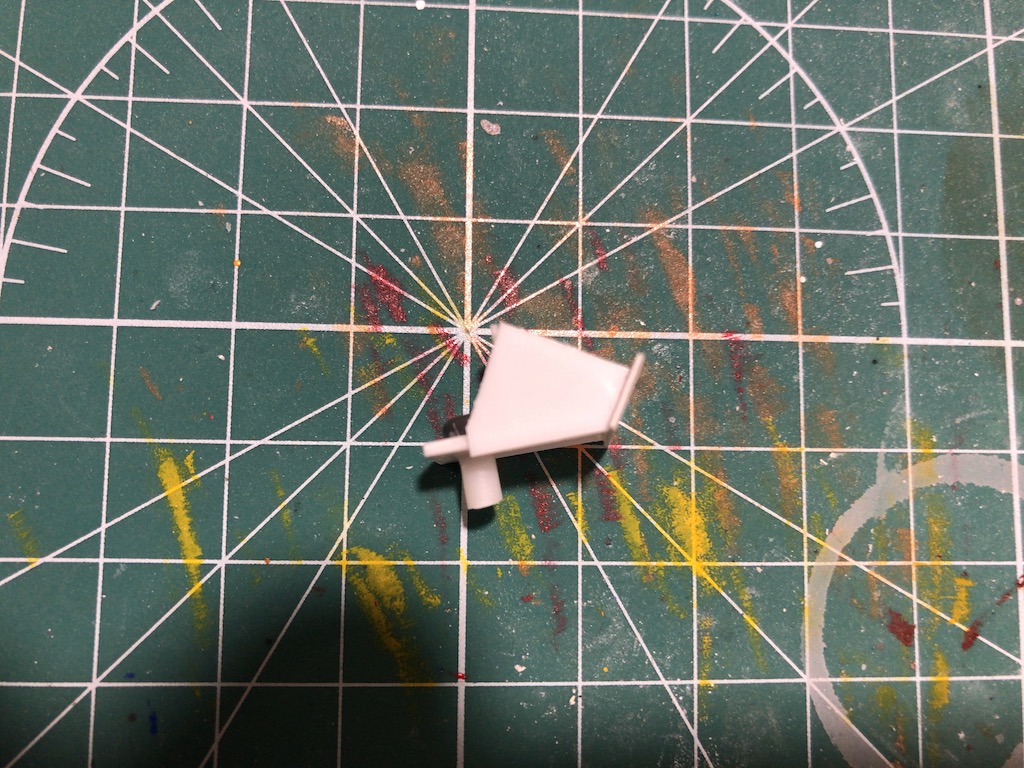
接続してみた様子。腕がまっすぐの状態では、シールドが斜めになって少し違和感がありますが、開いた状態や前に構えた時には自然に見えます。
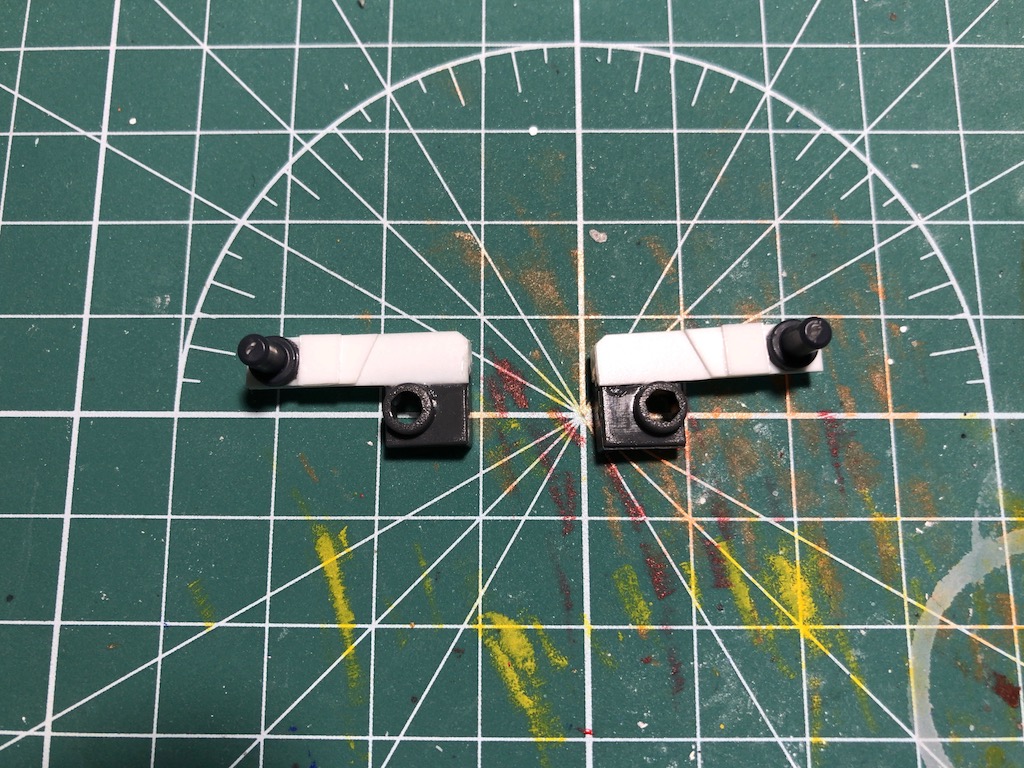
ジョイントだけでは違和感が出るので、腕に引っかかるパーツをダンタリオンの太もも装甲の一部を使って作製。色を塗れば違和感もなくなるでしょう。ディテールアップはまた次の機会に。
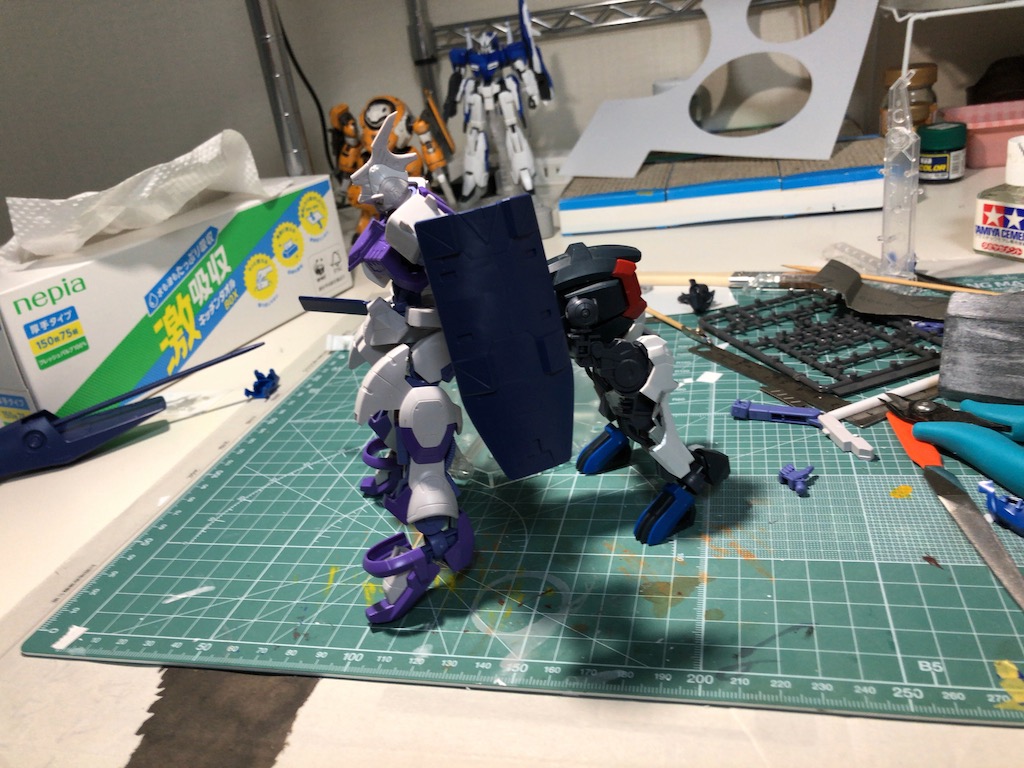

バランスが改善したことで、だいぶポーズが決まるように。
個人的にシールドの角度はこれぐらいの方が好みだったりします。腕と並行につけるとどうしても前に構えたときに腕が不自然になるので。
まとめ
今回は変形用のジョイントパーツを作製することで、ケンタウルス形態のバランス改善を行いました。変形形態がMS形態から離れれば離れるほど、バランス調整が難しくなりますね。考えを形にするのが難しい……
色々改造する箇所は残っていますが、次はどこを改造しようか……
今回も最後まで見ていただき、ありがとうございます。次回もお楽しみに。


コメント